工具介绍
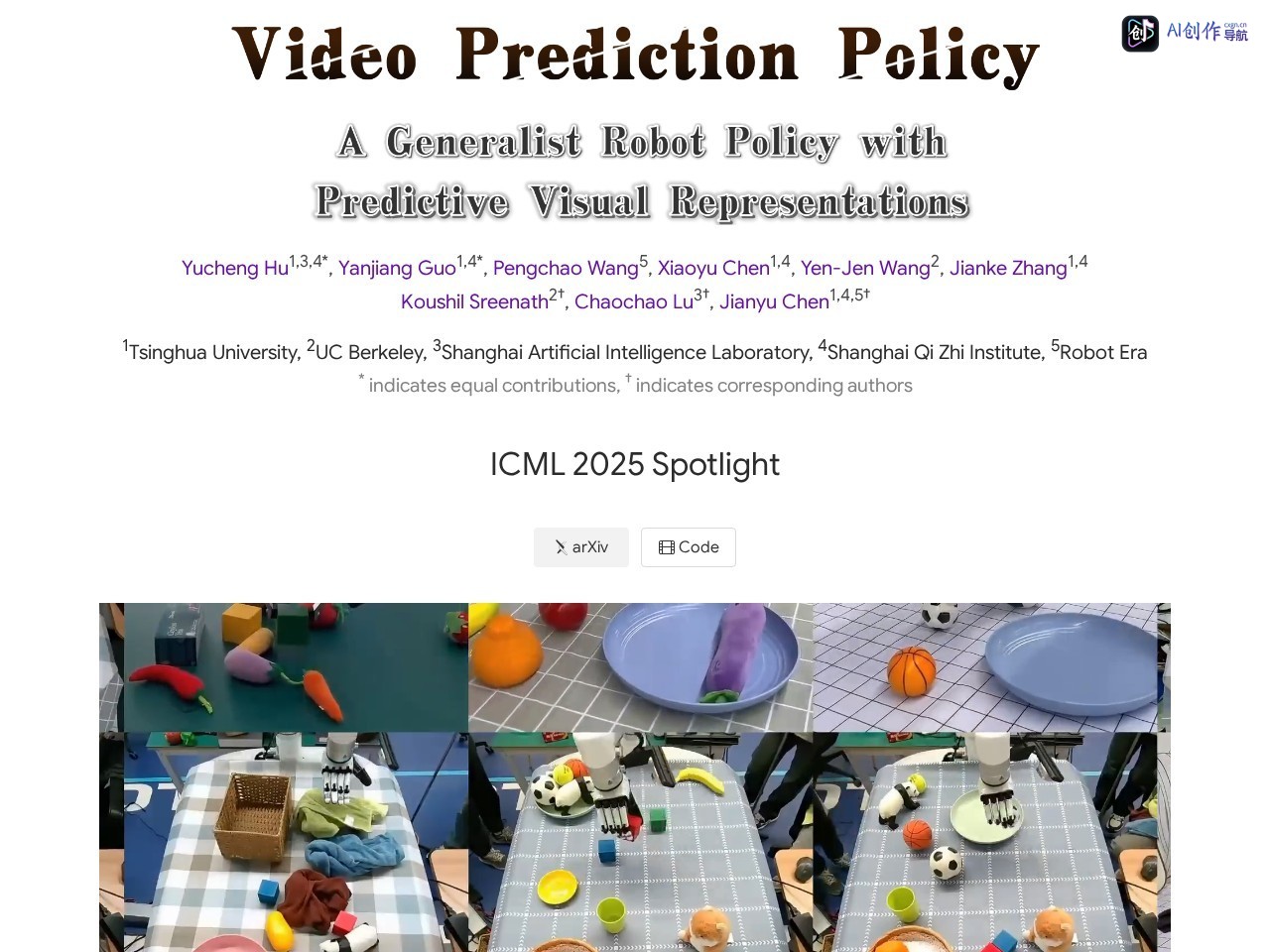
Video Prediction Policy(简称VPP)是基于视频扩散模型(VDM)的预测视觉表征能力打造的通用机器人策略,核心依托视频扩散模型对物理动态的深度理解能力,提取能够反映物理世界演化规律的视觉表征支撑机器人决策。VPP融合多类人类、机器人操纵数据集,采用统一的视频生成训练目标优化表征能力,在仿真和真实场景的机器人操纵任务中表现均优于现有同类方法,是机器人操纵、模仿学习领域的前沿技术方案。
效果展示/案例参考
VPP在两类仿真基准、两类真实世界机器人操纵基准测试中均取得优于现有方法的表现:在Calvin ABC-D基准测试中,VPP较此前行业最优方案实现41.5%的相对性能提升;在复杂真实场景的灵巧操纵任务中,任务成功率较现有方法提升31.6%,可稳定适配不同复杂度、不同环境下的机器人操纵需求。
核心功能
- 预测视觉表征提取:基于视频扩散模型提取反映物理世界演化规律的视觉表征,为机器人决策提供底层支撑
- 多源数据集适配:支持融合多样人类操纵数据集、机器人操纵数据集,全面优化模型表征能力
- 统一训练目标优化:采用统一视频生成训练目标,强化模型对不同操纵任务的适配性
- 多场景基准适配:可适配仿真、真实世界两类场景下的机器人操纵基准测试
- 灵巧操纵任务支持:可支持复杂真实场景下的高难度灵巧操纵任务落地
- 性能对比输出:可自动输出与现有同类方法的性能对比数据,直观展示优化效果
使用流程
- 步骤1:接入对应机器人操纵场景的数据集,完成数据格式适配
- 步骤2:调用视频扩散模型模块生成预测视觉表征,输入VPP框架
- 步骤3:选择对应训练目标,启动模型训练优化流程
- 步骤4:输出适配目标场景的机器人操纵策略,开展落地测试
使用场景
- 场景1:工业机器人灵巧操纵场景,用于提升装配、分拣、检测等复杂任务的执行成功率
- 场景2:机器人模仿学习研发场景,作为前沿通用策略框架支撑技术迭代与方案验证
- 场景3:仿真环境机器人训练场景,用于快速验证机器人操纵方案的可行性与性能表现
登录后解锁全文,体验收藏、点赞、评论等完整功能
立即登录
免责声明:本网站仅提供网址导航服务,对链接内容不负任何责任或担保。
 网站截图
网站截图
















 滇公网安备 53252802528133号
滇公网安备 53252802528133号